Norton viscoplastic model with a Green yield surface#
In this example, we implement and solve a rate-dependent viscoplastic constitutive model that combines a Green-type yield surface with a Norton viscoplastic flow rule.
Objectives
The goal of this demo is to illustrate how to:
Define a custom yield surface in stress space that depends on both hydrostatic and deviatoric stress components.
Implement a Norton-type overstress law, which governs how the viscoplastic strain rate increases with the level of overstress.
Integrate the constitutive equations over a time step using implicit local updates, solved automatically with the
optimistixroot-finding engine.Evaluate the model response for a batch of load cases and initial states.
Model overview#
The Green yield function is defined as:
where
\(\sigma_m = \frac{1}{3}\,\tr(\bsig)\) is the mean (hydrostatic) stress, and
\(\bs = \bsig - \sigma_m \boldsymbol{I}\) is the deviatoric stress tensor.
\(A\) is a material parameter describing the eccentricity of the Green ellipse.
The Norton flow law relates the viscoplastic strain rate to the overstress \(f(\bsig) - \sigma_y\):
where \(\langle \cdot \rangle_+ = \max\{\cdot, 0\}\) is the positive part, \(K\) controls the viscosity and \(m\) is the Norton exponent.
import jax
import jax.numpy as jnp
jax.config.update("jax_platform_name", "cpu")
import jaxmat
import jaxmat.materials as jm
from jaxmat.tensors import SymmetricTensor2, dev
from jaxmat.loader import ImposedLoading, global_solve
import equinox as eqx
import optimistix as optx
import matplotlib.pyplot as plt
Model implementation#
The final viscoplastic behavior is represented in jaxmat as an equinox.Module consisting of several other submodules corresponding to:
the elastic model (isotropic elasticity here)
the plastic yield surface
the viscoplastic flow rule
the material yield stress (no hardening in this example)
Internal state#
Attached to this behavior, we will also need to define the material internal state. The latter derives from jaxmat.state.AbstractState and consists here of the total viscoplastic strain \(\bepsvp\)[1]. We define the default factory functions to choose the internal state variable initial value.
class InternalState(jaxmat.state.AbstractState):
epsvp: SymmetricTensor2 = eqx.field(default_factory=lambda: SymmetricTensor2())
Green yield surface#
We now first define the Green plastic yield surface as the GreenYieldSurface module. It takes a single float parameter A describing the ellipsoid eccentricity. The yield surface expression is defined in the __call__ dunder method. A normal method is then defined from the yield surface gradient to compute the (non-unitary) normal vector. Note that we define a safe_zero decorator to avoid NaNs when the stress tensor is zero, which may happen upon initialization for instance. To avoid NaNs in jnp.where sections in adjoint computations, we use the double where trick.
def safe_zero(method):
def wrapper(self, x):
x_norm = jnp.linalg.norm(x)
x_safe = SymmetricTensor2(tensor=jnp.where(x_norm > 0, x, x))
return jnp.where(x_norm > 0, method(self, x_safe), 0.0)
return wrapper
class GreenYieldSurface(eqx.Module):
A: float = eqx.field(converter=jnp.asarray)
@safe_zero
def __call__(self, sig):
sig_m = jnp.trace(sig) / 3
s = dev(sig)
return jnp.sqrt(self.A**2 * sig_m**2 + 3.0 / 2.0 * jnp.vdot(s, s))
def normal(self, sig):
return jax.jacfwd(self.__call__)(sig)
Viscoplastic flow#
Next, the Norton flow is defined similarly as a module with two material parameters K and m. It takes as input to __call__ the overstress.
class NortonFlow(eqx.Module):
K: float = eqx.field(converter=jnp.asarray)
m: float = eqx.field(converter=jnp.asarray)
def __call__(self, overstress):
return jnp.maximum(overstress / self.K, 0) ** self.m
Implicit integration#
Finally, we can now define the GreenViscoPlasticity behavior. The latter is a subclass of SmallStrainBehavior and requires an elastic model, a yield stress (a float here), a plastic yield surface (of Green type here) and a viscoplastic flow (of Norton type here), in addition to its internal state.
The constitutive update is then implemented by first gathering the previous values for the stress and internal state variables. An eval_stress method is defined as follows:
Finally, the solve_state function implemented below computes the new viscoplastic strain \(\bepsvp\) as a function of the old value \(\bepsvp_n\) and the strain increment \(\Delta \beps\) by solving the implicit discretized system of evolution equations:
where \(\bn = \partial f /\partial\bsig\) is the yield surface normal evaluated at the final stress.
The full implementation reads:
class GreenViscoPlasticity(jm.SmallStrainBehavior):
elasticity: jm.LinearElasticIsotropic
yield_stress: float = eqx.field(converter=jnp.asarray)
plastic_surface: GreenYieldSurface
viscoplastic_flow: NortonFlow
internal_type = InternalState
@eqx.filter_jit
@eqx.debug.assert_max_traces(max_traces=1)
def constitutive_update(self, eps, state, dt):
eps_old = state.strain
deps = eps - eps_old
isv_old = state.internal
epsvp_old = isv_old.epsvp
sig_old = state.stress
def eval_stress(deps, depsvp):
return sig_old + self.elasticity.C @ (deps - depsvp)
def solve_state(deps, epsvp_old):
def residual(depsvp, args):
sig = eval_stress(deps, depsvp)
overstress = self.plastic_surface(sig) - self.yield_stress
dp = dt * self.viscoplastic_flow(overstress)
n = self.plastic_surface.normal(sig)
res = depsvp - n * dp
epsvp = epsvp_old + depsvp
return (res, epsvp)
sol = optx.root_find(
residual, self.solver, epsvp_old, has_aux=True, adjoint=self.adjoint
)
depsvp = sol.value
epsvp = sol.aux
sig = eval_stress(deps, depsvp)
return sig, epsvp
sig, epsvp = solve_state(deps, epsvp_old)
isv = isv_old.update(epsvp=epsvp)
new_state = state.update(strain=eps, stress=sig, internal=isv)
return sig, new_state
Note that the residual function returns the above residual as well as the new viscoplastic strain as an auxiliary argument. We then solve an optimistix root-finding problem with a default Newton solver (self.solver). In optimistix, an adjoint method is also defined in order to compute gradients through the root-finding solver. By default, we use an implicit ajoint solver which back-propagates gradient using the Implicit Function Theorem, see the optimistix docs section for more details.
Finally, after solving, we recover the final stress and viscoplastic strain and update the state and internal state variables accordingly.
Evaluating the model#
We now instantiate the Green viscoplastic model from its different components
elasticity = jm.LinearElasticIsotropic(E=210e3, nu=0.3)
sig0 = 300.0
green_ys = GreenYieldSurface(A=0.6)
viscoplastic_flow = NortonFlow(K=50.0, m=4.0)
material = GreenViscoPlasticity(
elasticity=elasticity,
yield_stress=sig0,
plastic_surface=green_ys,
viscoplastic_flow=viscoplastic_flow,
)
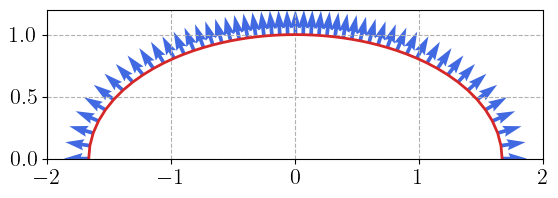
Below, we evaluate the Green yield surface and its normal in the \((p, q)\) space of hydrostatic and deviatoric stresses.
Time-dependent load-cases#
We now consider a set of time-varying load cases.
Initial state#
We start with an initial hydrostatic stress state \(\bsig_{n=0} = - p_0\bI\) for different values of the initial pressure \(p_0\). All 8 values for the pressure will form a batch of load cases which will be evaluated simultaneously. We thus start with a default initial state with material.init_state with a batch dimension Nbatch=9. Then, we modify, in the state PyTree, the stress field with the imposed initial hydrostatic stresses.
Nbatch = 9
press_vals = jnp.linspace(-sig0, sig0, Nbatch)
state = material.init_state(Nbatch)
def set_initial_press(state, press):
state = state.update(stress=SymmetricTensor2(tensor=-press * jnp.eye(3)))
return state
initial_state = eqx.filter_vmap(set_initial_press)(state, press_vals)
print(initial_state.stress[:, 0, 0])
[ 300. 225. 150. 75. -0. -75. -150. -225. -300.]
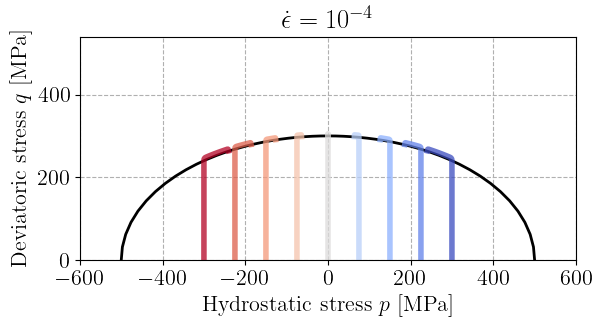
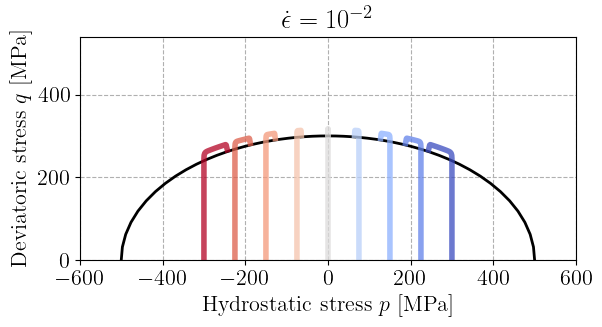
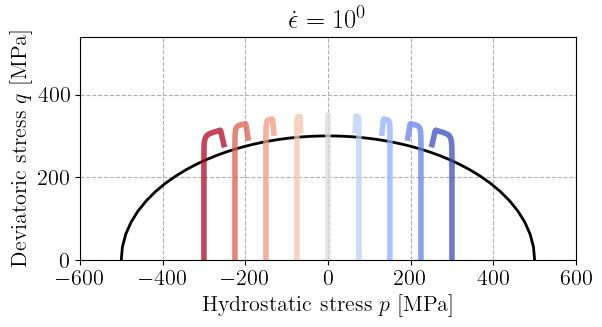
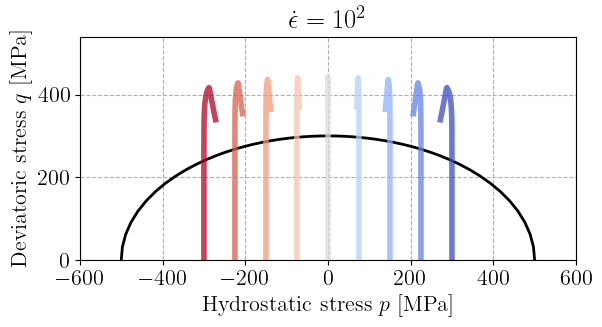
From this initial state, we consider a time-varying imposed strain of a purely deviatoric form \(\beps(t) = \epsilon(t)\diag(1,-1/2,-1/2)\) where the loading is first applied linearly with time at a strain rate \(\dot\epsilon\) and is then held fixed once reaching the final strain \(\epsilon_\text{max} = 2.10^{-3}\), i.e. \(\epsilon(t) = \min\{\dot\epsilon t ; \epsilon_\text{max}\}\).
The strain is imposed via the ImposedLoading class and the global_solve function[2]. We then recover the stress state in the \((p, q)\) space.
Finally, the stress path is plotted for all imposed initial pressures. The reference yield surface is shown in black and we can observe the plastic evolution for a stress state larger than the elastic yield surface due to the viscous overstress, with a clear effect of the strain rate.
for eps_dot in [1e-4, 1e-2, 1e0, 1e2]:
eps_max = 2e-3
Nsteps = 100
times = jnp.linspace(0, 2 * eps_max / eps_dot, Nsteps)
t = 0
imposed_eps = jnp.zeros_like(press_vals)
results = jnp.zeros((Nsteps, Nbatch, 2))
state = initial_state
p, q = jax.vmap(compute_pq)(state.stress)
results = results.at[0, :, 0].set(p)
results = results.at[0, :, 1].set(q)
for i, dt in enumerate(jnp.diff(times)):
t += dt
imposed_eps += eps_dot * dt
imposed_eps = jnp.minimum(imposed_eps, eps_max)
loading = ImposedLoading(
epsxx=imposed_eps, epsyy=-imposed_eps / 2, epszz=-imposed_eps / 2
)
Eps = state.strain
Eps, state, stats = global_solve(Eps, state, loading, material, dt)
Sig = state.stress
p, q = jax.vmap(compute_pq)(Sig)
results = results.at[i + 1, :, 0].set(p)
results = results.at[i + 1, :, 1].set(q)
cmap = plt.get_cmap("coolwarm")
colors = cmap(jnp.linspace(0, 1, Nbatch))
plt.title(rf"$\dot\epsilon=10^{{{jnp.log10(eps_dot):.0f}}}$")
plt.plot(sig0 * x, sig0 * y, "-k")
for i in range(Nbatch):
plt.plot(
results[:, i, 0],
results[:, i, 1],
"-",
color=colors[i],
linewidth=4,
alpha=0.75,
)
plt.gca().set_aspect("equal")
plt.xlim(-2.0 * sig0, 2.0 * sig0)
plt.ylim(0.0, 1.8 * sig0)
plt.xlabel("Hydrostatic stress $p$ [MPa]")
plt.ylabel("Deviatoric stress $q$ [MPa]")
plt.show()