Finite-strain elastoplasticity within the logarithmic strain framework#
This demo is dedicated to the resolution of a finite-strain elastoplastic problem using the logarithmic strain framework proposed in [Miehe et al., 2002].
Tip
This simulation is a bit heavy to run so we suggest running it in parallel.
Logarithmic strains#
This framework expresses constitutive relations between the Hencky strain measure \(\boldsymbol{H} = \dfrac{1}{2}\log (\boldsymbol{F}^\text{T}\cdot\boldsymbol{F})\) and its dual stress measure \(\boldsymbol{T}\). This approach makes it possible to extend classical small strain constitutive relations to a finite-strain setting. In particular, the total (Hencky) strain can be split additively into many contributions (elastic, plastic, thermal, swelling, etc.) e.g. \(\boldsymbol{H}=\boldsymbol{H}^e+\boldsymbol{H}^p\). Its trace is also linked with the volume change \(J=\exp(\operatorname{tr}(\boldsymbol{H}))\). As a result, the deformation gradient \(\boldsymbol{F}\) is used for expressing the Hencky strain \(\boldsymbol{H}\), a small-strain constitutive law is then written for the \((\boldsymbol{H},\boldsymbol{T})\)-pair and the dual stress \(\boldsymbol{T}\) is then post-processed to an appropriate stress measure such as the Cauchy stress \(\boldsymbol{\sigma}\) or Piola-Kirchhoff stresses.
MFront implementation#
The logarithmic strain framework discussed in the previous paragraph consists merely as a pre-processing and a post-processing stages of the behavior integration. The pre-processing stage compute the logarithmic strain and its increment and the post-processing stage inteprets the stress resulting from the behavior integration as the dual stress \(\boldsymbol{T}\) and convert it to the Cauchy stress.
MFront provides the @StrainMeasure keyword that allows to specify which strain measure is used by the behavior. When choosing the Hencky strain measure, MFront automatically generates those pre- and post-processing stages, allowing the user to focus on the behavior integration.
This leads to the following implementation (see the small-strain elastoplasticity example for details about the various implementations available):
@DSL Implicit;
@Behaviour LogarithmicStrainPlasticity;
@Author Thomas Helfer/Jérémy Bleyer;
@Date 07 / 04 / 2020;
@StrainMeasure Hencky;
@Algorithm NewtonRaphson;
@Epsilon 1.e-14;
@Theta 1;
@MaterialProperty stress s0;
s0.setGlossaryName("YieldStress");
@MaterialProperty stress H0;
H0.setEntryName("HardeningSlope");
@Brick StandardElastoViscoPlasticity{
stress_potential : "Hooke" {
young_modulus : 210e9,
poisson_ratio : 0.3
},
inelastic_flow : "Plastic" {
criterion : "Mises",
isotropic_hardening : "Linear" {H : "H0", R0 : "s0"}
}
};
FEniCSx implementation#
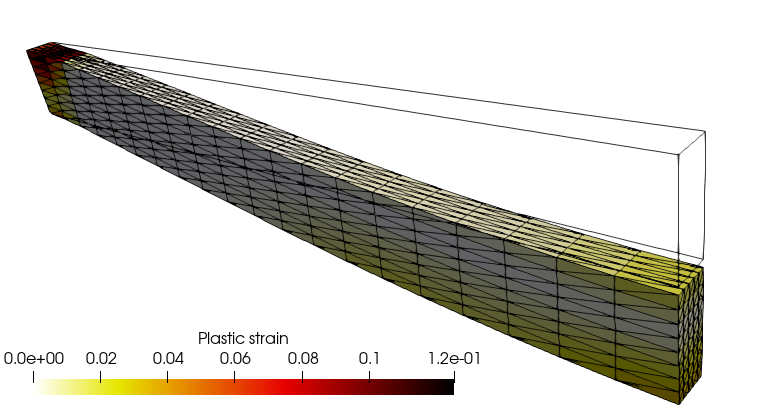
We define a box mesh representing half of a beam oriented along the \(x\)-direction. The beam will be fully clamped on its left side and symmetry conditions will be imposed on its right extremity. The loading consists of a uniform self-weight.
import numpy as np
import matplotlib.pyplot as plt
import os
import ufl
from petsc4py import PETSc
from mpi4py import MPI
from dolfinx import fem, mesh, io
from dolfinx_materials.quadrature_map import QuadratureMap
from dolfinx_materials.mfront import MFrontMaterial
from dolfinx_materials.solvers import NonlinearMaterialProblem
from dolfinx_materials.utils import (
nonsymmetric_tensor_to_vector,
)
comm = MPI.COMM_WORLD
rank = comm.rank
current_path = os.getcwd()
length, width, height = 1.0, 0.04, 0.1
nx, ny, nz = 20, 4, 6
domain = mesh.create_box(
comm,
[(0, -width / 2, -height / 2.0), (length, width / 2, height / 2.0)],
[nx, ny, nz],
cell_type=mesh.CellType.tetrahedron,
ghost_mode=mesh.GhostMode.none,
)
gdim = domain.topology.dim
V = fem.functionspace(domain, ("P", 2, (gdim,)))
def left(x):
return np.isclose(x[0], 0)
def right(x):
return np.isclose(x[0], length)
left_dofs = fem.locate_dofs_geometrical(V, left)
V_x, _ = V.sub(0).collapse()
right_dofs = fem.locate_dofs_geometrical((V.sub(0), V_x), right)
uD = fem.Function(V_x)
bcs = [
fem.dirichletbc(np.zeros((gdim,)), left_dofs, V),
fem.dirichletbc(uD, right_dofs, V.sub(0)),
]
selfweight = fem.Constant(domain, np.zeros((gdim,)))
du = ufl.TrialFunction(V)
v = ufl.TestFunction(V)
u = fem.Function(V, name="Displacement")
The MFrontMaterial instance is loaded from the MFront LogarithmicStrainPlasticity behavior. This behavior is a finite-strain behavior (material.is_finite_strain=True) which relies on a kinematic description using the total deformation gradient \(\boldsymbol{F}\). By default, a MFront behavior always returns the Cauchy stress as the stress measure after integration. However, the stress variable dual to the deformation gradient is the first Piola-Kirchhoff (PK1) stress. An internal option of the MGIS interface is therefore used in the finite-strain context to return the PK1 stress as the “flux” associated to the “gradient” \(\boldsymbol{F}\). Both quantities are non-symmetric tensors, aranged as a 9-dimensional vector in 3D following MFront conventions on tensors.
material = MFrontMaterial(
os.path.join(current_path, "src/libBehaviour.so"),
"LogarithmicStrainPlasticity",
material_properties={"YieldStrength": 250e6, "HardeningSlope": 1e6},
)
if rank == 0:
print(material.behaviour.getBehaviourType())
print(material.behaviour.getKinematic())
print(material.gradient_names, material.gradient_sizes)
print(material.flux_names, material.flux_sizes)
StandardFiniteStrainBehaviour
F_CAUCHY
['DeformationGradient'] [9]
['FirstPiolaKirchhoffStress'] [9]
In this large-strain setting, the QuadratureMapping acts from the deformation gradient \(\boldsymbol{F}=\boldsymbol{I}+\nabla\boldsymbol{u}\) to the first Piola-Kirchhoff stress \(\boldsymbol{P}\). We must therefore register the deformation gradient as Identity(3)+grad(u).
def F(u):
return nonsymmetric_tensor_to_vector(ufl.Identity(gdim) + ufl.grad(u))
def dF(u):
return nonsymmetric_tensor_to_vector(ufl.grad(u))
qmap = QuadratureMap(domain, 2, material)
qmap.register_gradient("DeformationGradient", F(u))
We will work in a Total Lagrangian formulation, writing the weak form of equilibrium on the reference configuration \(\Omega_0\), thereby defining the nonlinear residual weak form as: Find \(\boldsymbol{u}\in V\) such that:
where \(\boldsymbol{f}\) is the self-weight.
The corresponding Jacobian form is computed via automatic differentiation. As for the small-strain elastoplasticity example, state variables include the ElasticStrain and EquivalentPlasticStrain since the same behavior is used as in the small-strain case with the only difference that the total strain is now given by the Hencky strain measure. In particular, the ElasticStrain is still a symmetric tensor (vector of dimension 6). Note that it has not been explicitly defined as a state variable in the MFront behavior file since this is done automatically when using the IsotropicPlasticMisesFlow parser.
PK1 = qmap.fluxes["FirstPiolaKirchhoffStress"]
Res = (ufl.dot(PK1, dF(v)) - ufl.dot(selfweight, v)) * qmap.dx
Jac = qmap.derivative(Res, u, du)
Finally, we setup the nonlinear problem, the corresponding Newton solver and solve the load-stepping problem.
petsc_options = {
"snes_type": "newtonls",
"snes_linesearch_type": "none",
"snes_atol": 1e-8,
"snes_rtol": 1e-8,
"ksp_type": "preonly",
"pc_type": "lu",
"pc_factor_mat_solver_type": "mumps",
}
problem = NonlinearMaterialProblem(
qmap,
Res,
u,
bcs=bcs,
J=Jac,
petsc_options_prefix="elastoplasticity",
petsc_options=petsc_options,
)
Nincr = 30
load_steps = np.linspace(0.0, 1.0, Nincr + 1)
vtk = io.VTKFile(domain.comm, f"results/{material.name}.pvd", "w")
results = np.zeros((Nincr + 1, 2))
for i, t in enumerate(load_steps[1:]):
selfweight.value[-1] = -50e6 * t
problem.solve()
converged = problem.solver.getConvergedReason()
num_iter = problem.solver.getIterationNumber()
if rank == 0:
print(f"Increment {i+1} converged in {num_iter} iterations.")
p0 = qmap.project_on("EquivalentPlasticStrain", ("DG", 0))
vtk.write_function(u, t)
vtk.write_function(p0, t)
w = u.sub(2).collapse()
local_max = max(np.abs(w.x.array))
# Perform the reduction to get the global maximum on rank 0
global_max = comm.reduce(local_max, op=MPI.MAX, root=0)
results[i + 1, 0] = global_max
results[i + 1, 1] = t
vtk.close()
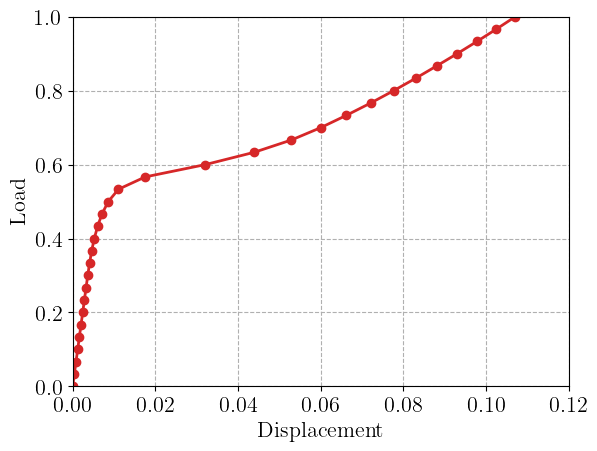
During the load incrementation, we monitor the evolution of the maximum vertical downwards displacement. The load-displacement curve exhibits a classical elastoplastic behavior rapidly followed by a stiffening behavior due to membrane catenary effects.
if rank == 0:
plt.figure()
plt.plot(results[:, 0], results[:, 1], "-oC3")
plt.xlabel("Displacement")
plt.ylabel("Load")
plt.show()
Finally, we report the total time spent in the nonlinear solver against the time spent inside the constitutive update function.
from dolfinx.common import timing
snes_solve = timing("SNES: solve")[1].total_seconds()
print(f"Total solving time {snes_solve:.2f}s")
constitutive_update_time = timing("SNES: constitutive update")[1].total_seconds()
print(f"Total time spent in constitutive update {constitutive_update_time:.2f}s")
Total solving time 36.16s
Total time spent in constitutive update 6.97s
References#
Christian Miehe, Nikolas Apel, and Matthias Lambrecht. Anisotropic additive plasticity in the logarithmic strain space: modular kinematic formulation and implementation based on incremental minimization principles for standard materials. Computer methods in applied mechanics and engineering, 191(47-48):5383–5425, 2002.